Here is the blog post I promised last week about visual marker tracking with #python and @godotengine :
https://t.co/ozSbzwqoam
Here is the blog post I promised last week about visual marker tracking with #python and @godotengine :
https://t.co/ozSbzwqoam
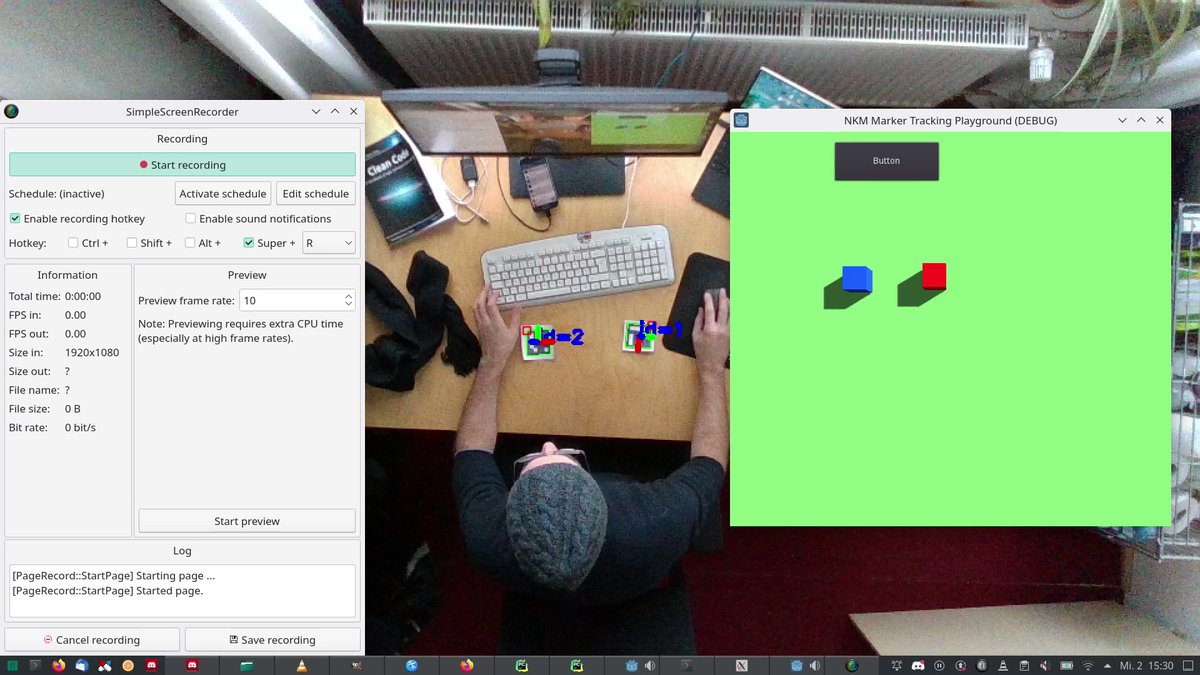
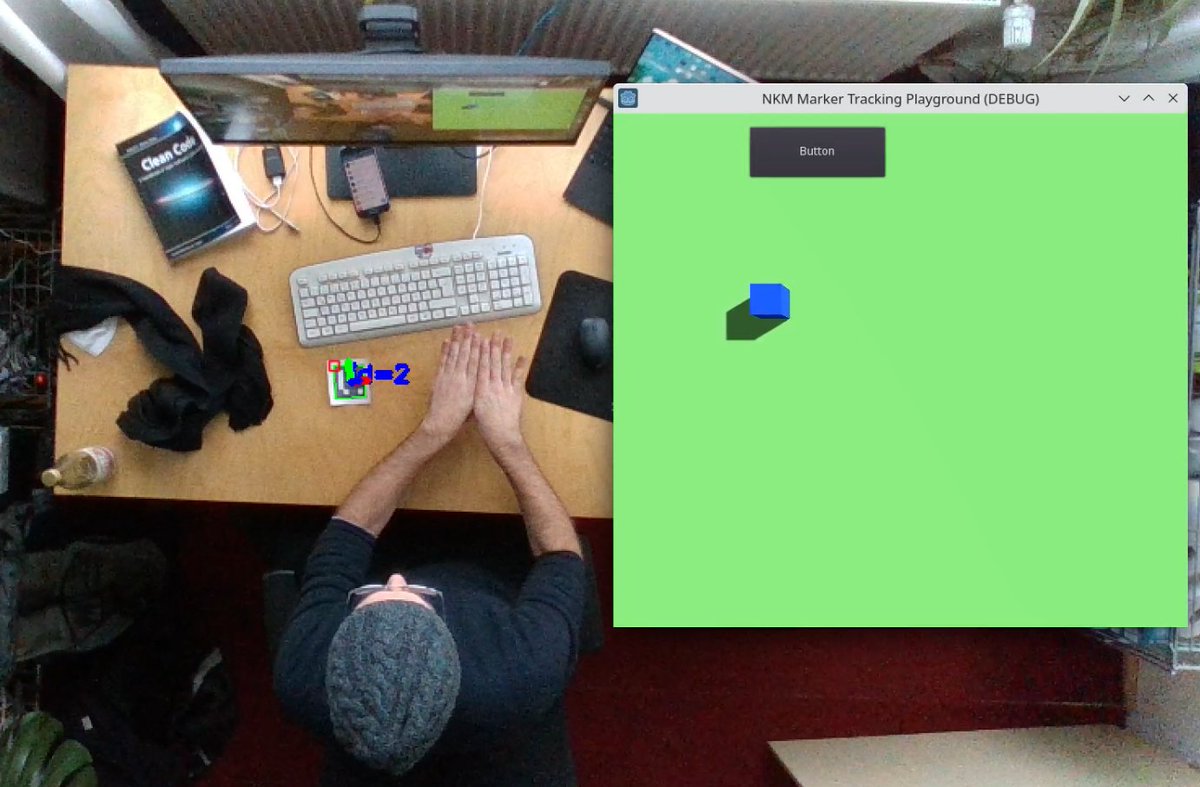
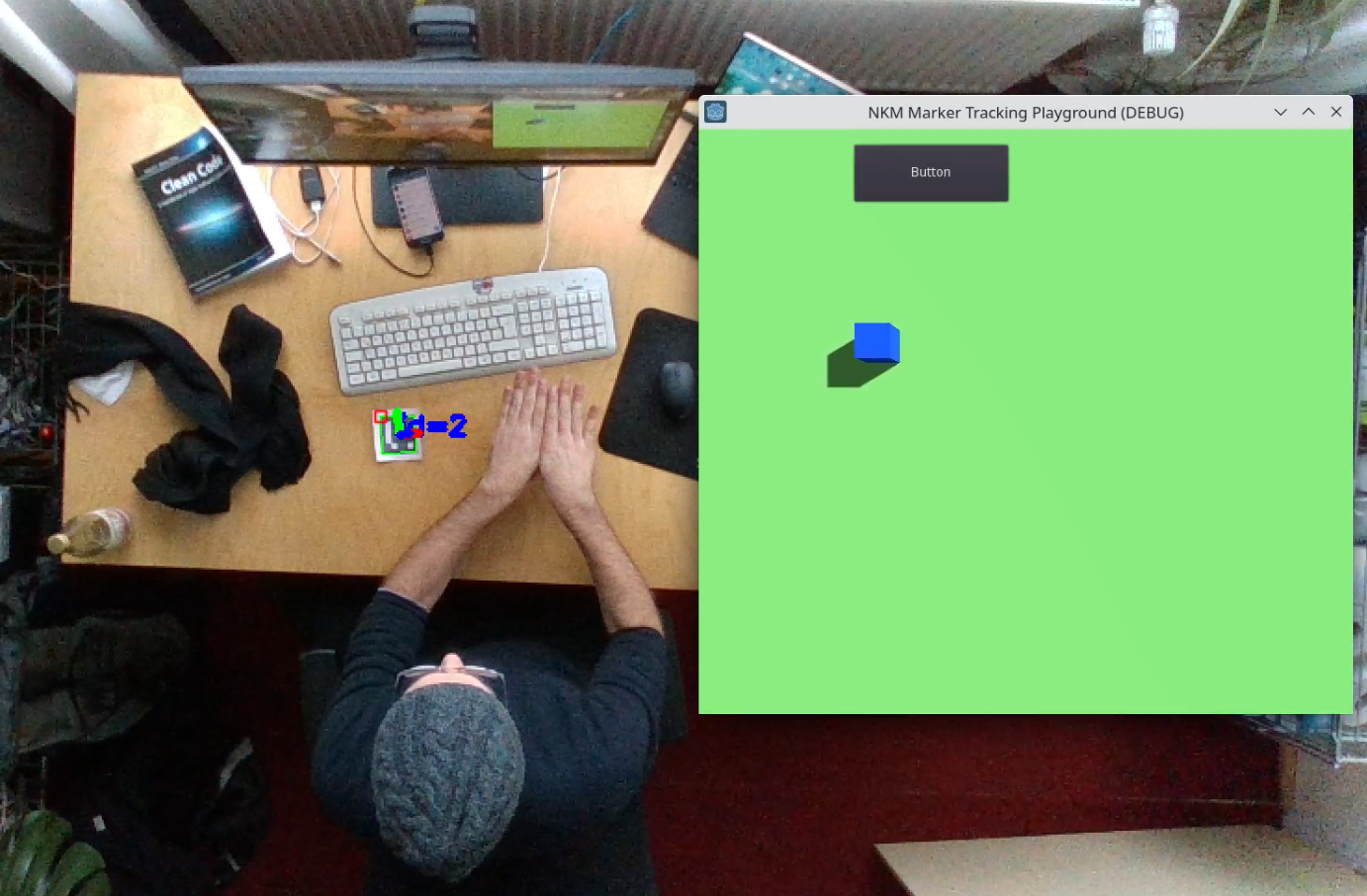
Did some immensely satisfying visual marker tracking experiments today with @opencvlibrary, #Python and @godotengine. Using @IntelRealSense cameras and local WebSocket streaming from python to Godot.
🎥🎲🤯
I'll do a blog post writeup @rotxblau tomorrow.
I did some research last week for a project we are doing for a museum. I can't go into detail here as we haven't finalized the contract details yet, but I can share a little about our thought process in finding a compelling build and the technological puzzle pieces that make it work.
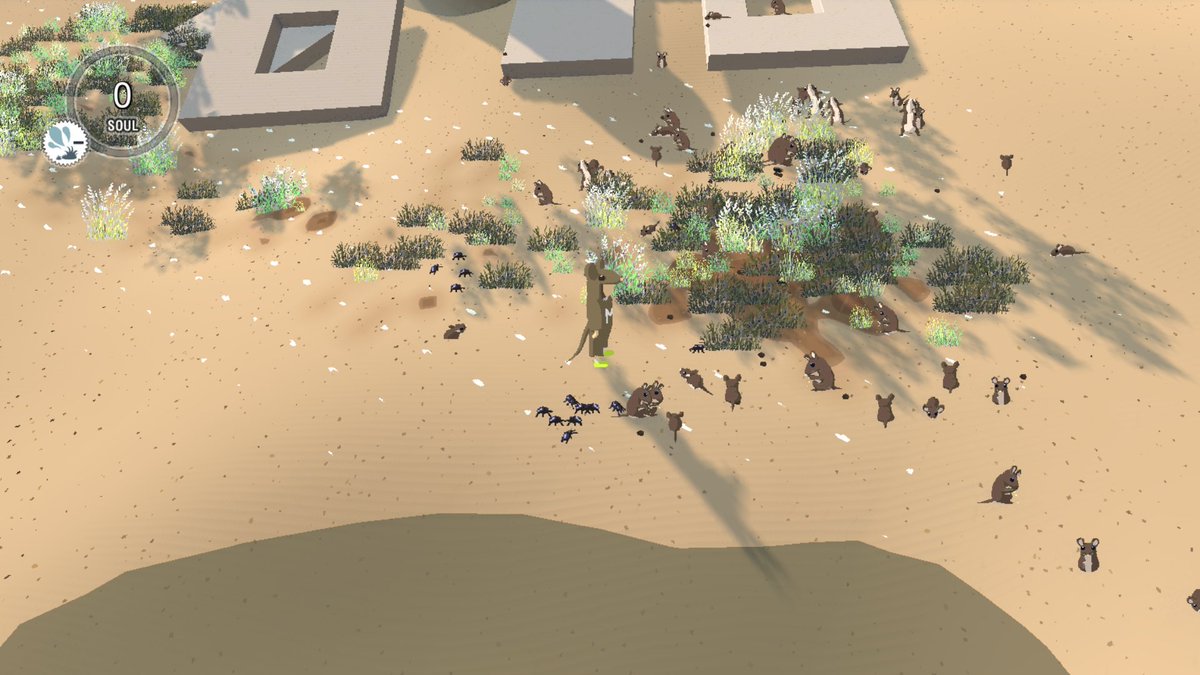
Some pixels for #screenshotsaturday of our ecosim game COYOTE. 🌳🌎🦊🐭🌿❤️
#ドット絵 #gameart #madewithgodot #IndieGameDev